- Формула периода колебаний математического маятника
- Математический маятник
- Формула для периода колебаний математического маятника
- Примеры задач с решением
- Период колебаний математического маятника
- Математический маятник — что это такое
- Определение модели системы
- Маятник Фуко
- Период колебаний математического маятника
- Чему равен, от чего зависит частота
- Уравнения движения и их решение, формулы с примерами
- Практическое применение математического маятника
- Учебники
- Журнал «Квант»
- Общие
- Математический маятник. Период колебаний математического маятника
- Литература
Формула периода колебаний математического маятника
Математический маятник
Математический маятник — это частный случай физического маятника, масса которого находится в одной точке.
Обычно математическим маятником считают маленький шарик (материальную точку), имеющий большую массу, подвешенный на длинной нерастяжимой нити (подвесе). Это идеализированная система, которая совершает колебания под воздействием силы тяжести. Только для углов порядка 50-100 математический маятник является гармоническим осциллятором, то есть совершает гармонические колебания.
Изучая качание паникадила на длинной цепи Галилей изучал свойства математического маятника. Он понял, что период колебаний данной системы не зависит от амплитуды при малых углах отклонения.
Формула для периода колебаний математического маятника
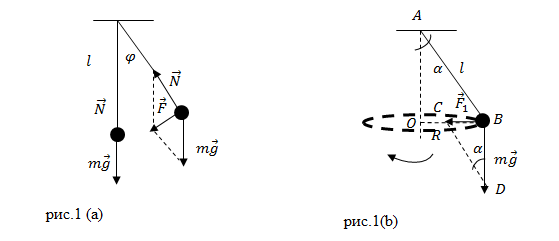
Пусть точка подвеса маятника неподвижна. Груз, подвешенный к нити маятника, движется по дуге окружности (рис.1(a)) с ускорением, на него действует некоторая возвращающая сила ($\overline
где $L$ — длина окружности; $v$ — скорость движения груза. Если углы отклонения нити от вертикали малые (небольшие амплитуды колебаний) то полагают, что возвращающая сила ($F_1$) направлена по радиусу окружности, которую описывает груз. Тогда эта сила равна центростремительной силе:
Рассмотрим подобные треугольники: AOB и DBC (рис.1 (b)).
Приравниваем правые части выражений (2) и (3), выражаем скорость движения груза:
Полученную скорость подставим в формулу (1), имеем:
Из формулы (5) мы видим, что период математического маятника зависит только от длины его подвеса (расстояния от точки подвеса до центра тяжести груза) и ускорения свободного падения. Формулу (5) для периода математического маятника называют формулой Гюйгенса, она выполняется, когда точка подвеса маятника не движется.
Используя зависимость периода колебаний математического маятника от ускорения свободного падения, определяют величину данного ускорения. Для этого измеряют длину маятника, рассматривая большое количество колебаний, находят период $T$, затем вычисляют ускорение свободного падения.
Примеры задач с решением
Задание. Как известно, величина ускорения свободного падения зависит от широты. Каково ускорение свободного падения на широте Москвы, если период колебаний математического маятник длиной $l=2,485\cdot <10>^<-1>$м равен T=1 c?\textit<>
Решение. За основу решения задачи примем формулу периода математического маятника:
Выразим из (1.1) ускорение свободного падения:
Вычислим искомое ускорение:
Ответ. $g=9,81\frac<м><с^2>$
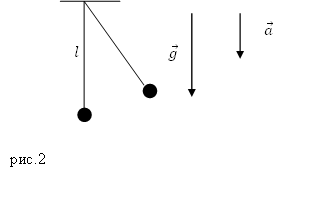
Задание. Каким будет период колебаний математического маятника, если точка его подвеса движется вертикально вниз 1) с постоянной скоростью? 2) с ускорением $a$? Длина нити этого маятника равна $l.$
Решение. Сделаем рисунок.
1) Период математического маятника, точка подвеса которого движется равномерно, равен периоду маятника с неподвижной точкой подвеса:
2) Ускорение точки подвеса маятника можно рассматривать как появление дополнительной силы, равной $F=ma$, которая направлена против ускорения. То есть, если ускорение направлено вверх, то дополнительная сила направлена вниз, значит, она складывается с силой тяжести ($mg$). Если точка подвеса движется с ускорением, направленным вниз, то дополнительная сила вычитается из силы тяжести.
Период математического маятника, который совершает колебания и у которого точка подвеса движется с ускорением, найдем как:
Ответ. 1) $T_1=2\pi \sqrt<\frac
Источник
Период колебаний математического маятника
Математический маятник — что это такое
Маятник — твердое тело, которое совершает под действием приложенных сил механические колебания около неподвижной точки или оси.
Простейший маятник состоит из небольшого груза массой m, подвешенного на невесомой нити или тонком стержне длиной l и совершающего колебания под воздействием земного притяжения. Если нить считать нерастяжимой, размер груза незначительным по сравнению с длиной нити, а массу нити незначительной по сравнению с массой груза, то груз можно считать материальной точкой массой m, находящейся на постоянном расстоянии l от точки подвеса. Такой маятник называют математическим.
Определение модели системы
Математические модели динамических систем часто используют для анализа самых разных технических, социально-экономических, естественнонаучных систем, в которых происходят циклические процессы.
Существуют различные классификации динамических процессов. Одна из них изображена на схеме:
Маятник Фуко
Маятник Фуко — подвес, плоскость колебаний которого со временем изменяется. Он был создан для экспериментальной демонстрации суточного вращения Земли. Впервые опыт, доказывающий, что Земля вращается, был проведен французским ученым Жаном Фуко в 1851 году в Парижской обсерватории. Маятник имел вид металлического шара массой 28 кг, подвешенного на нити длиной 67 м. Период его колебаний составлял 16,4 с.
Наблюдая за его колебаниями, можно было заметить, что плоскость, в которой они происходят, медленно поворачивается, причем в разных местах земного шара с различной скоростью. Она минимальна, т. е. равна нулю, на экваторе планеты, а максимальна — на ее полюсах.
Если мы обозначим период вращения Земли вокруг ее оси Т, а географическую широту местности — φ , тогда время t, за которое плоскость колебаний маятника совершает полный оборот, окажется равно
Отсюда следует, что если бы Земля не вращалась, данного эффекта просто не существовало бы. Это обстоятельство указывает на то, что причиной неинерциальности земной системы отсчета является вращение планеты.
Центробежное ускорение на экваторе равно 0,034 м/с^2. По сравнению с экваториальным ускорением свободного падения g = 9,78 м/с^2 это величина малая, но она заметно влияет на изменение веса тела на экваторе по сравнению с его весом на полюсе. Если, например, взвешивать на пружинных весах тело массой 10 кг, то уменьшение веса на экваторе за счет действия центробежной силы составит около 35 г.
Период колебаний математического маятника
Период колебаний — время, за которое происходит одно полное колебание. В СИ измеряется в секундах.
Чему равен, от чего зависит частота
Если за время t совершается N колебаний, то период, обозначаемый буквой T, равен
где v — частота колебаний. Она обратно пропорциональна периоду.
Колебания можно изобразить в виде графика:
Источник: physik.ucoz.ru.
Период колебаний математического маятника можно рассчитать по формуле
g — ускорение свободного падения. Не зависит от амплитуды колебаний и массы груза.
Циклическая частота — число колебаний, которые система совершает за 2 π секунды. Также циклическую частоту называют угловой, круговой или радиальной. Кратко ее записывают греческой буквой ω . Она позволяет упростить расчеты с использованием радианов, так как при ее введении сокращаются множители 2 π .
В случае математического маятника она определяется длиной подвеса и ускорением свободного падения:
Для физического маятника в уравнение добавляются инерция и масса подвеса:
Для пружинного маятника частоту определяет жесткость пружины k:
Уравнения движения и их решение, формулы с примерами
Математический маятник — это материальная точка, имеющая массу m и подвешенная на нити с неизменяемой длиной l. Покидая положение равновесия, подвес совершает колебательные движения по дуге.
Источник: osu.ru.
Угловое ускорение ε — вторая производная от угла поворота α , вращающий момент относительно точки А создает только сила тяжести:
M = — m g × l sin α .
Угол отклонения мал, поэтому мы учитываем только то, что он отрицателен. Синус угла α считаем приблизительно равным α . Тогда:
m l 2 × α ‘ ‘ = — m g l α ;
Это дает нам дифференциальное уравнение гармонических колебаний
Из уравнения следует, что при малых углах отклонения от положения равновесия маятник будет колебаться с периодом
T = 2 π ω = 2 π l g .
Все кинематические характеристики движения меняются по гармоническим законам, т. е. по закону синуса или косинуса. Рассмотрим, от чего зависят константы амплитуды А и начальной фазы движения φ 0 .
Амплитуда колебаний определяется энергией, переданной маятнику при отклонении от положения равновесия. В случае пружинного маятника в крайнем положении скорость груза и кинетическая энергия равны нулю, полная энергия состоит только из потенциальной энергии:
E п о л н а я = k A 2 2 .
Из этого следует, что
А = 2 E п о л н а я k .
Начальная фаза зависит от того, как маятник вывели из положения равновесия. Рассмотрим ситуацию, в которой маятник отклонили от положения равновесия на расстояние А и отпустили без начальной скорости. Запишем уравнение движения колеблющегося тела с учетом того факта, что в начальный момент координата тела будет равна А:
x = A × cos ω t + φ 0 ;
x ( 0 ) = A × cos ω × 0 + φ 0 = A × cos φ 0 = А ⇒ cos φ 0 = 1 ⇒ φ 0 = 1 .
Уравнение движения маятника:
Если маятник толкнули, когда он находился в положении равновесия, начальная координата колеблющейся точки будет равна нулю:
x ( 0 ) = A × cos ω × 0 + φ 0 = A × cos φ 0 = 0 ⇒ cos φ 0 = 0 ⇒ φ 0 = ± π 2 .
Будет ли начальная координата положительной или отрицательной, определяет выбор положительного направления оси. Если направление оси совпадет с направлением начальной скорости, то в уравнении движения будет знак «плюс», если не совпадет — знак «минус».
Уравнение движения маятника:
x ( 0 ) = A × cos ω t ± π 2 = ± A × sin ω t .
Рассмотрим задачи, для которых требуется составлять и решать уравнения движения.
Необходимо определить амплитуду и частоту колебаний точки, если известно, что при смещении точки от положения равновесия на 5 см ее скорость равна 6 см/с, а при смещении на 3 см — 10 см/с.
x = A × cos ω t + φ 0 v x = x ‘ = — A ω × sin ω t + φ 0
Исключаем время из системы:
x = A × cos ω t + φ 0 v x = x ‘ = — A ω × sin ω t + φ 0 ⇒ x = A × cos ω t + φ 0 v x ω = — A × sin ω t + φ 0 ⇒ x 2 = A 2 × cos 2 ω t + φ 0 v 2 ω 2 = A 2 × sin 2 ω t + φ 0
x 2 + v 2 ω 2 = А 2 .
x 2 А 2 + v 2 v 2 m a x = 1 .
x 1 2 + v 1 2 ω 2 = А 2 x 2 2 + v 2 2 ω 2 = А 2
Преобразовав выражения и подставив значения, данные в условиях задачи, получаем:
ω = v 2 2 — v 1 2 x 1 2 — x 2 2 = 2 c — 1 ;
A = x 1 2 v 2 2 — x 2 2 v 1 2 v 1 2 — v 2 2 ≈ 5 , 57 с м ;
v = ω 2 π ≈ 0 , 32 Г ц .
Необходимо вычислить циклическую частоту колебаний точки, если известно, что при скорости 13 см/с ускорение равнялось 6 см/с^2, а при уменьшении скорости до 12 см/с произошло увеличение ускорения до 10 см/с^2.
Решение:
Координата точки меняется по закону
Запишем уравнения скорости и ускорения точки:
v x = — A × ω × sin ω t a x = — A × ω 2 × cos ω t ⇒ v x A ω = — sin ω t a x A ω 2 = — cos ω t ⇒ v 2 ω 2 + a 2 ω 4 = A 2 .
Преобразуем уравнение, исключив из него А, и подставим значения, данные в условиях задачи:
ω = a 2 2 — a 1 2 v 1 2 — v 2 2 = 1 , 6 c — 1 .
Практическое применение математического маятника
С помощью математического моделирования динамических систем можно обнаружить схожесть динамических процессов в реальных физических, технических, биологических, химических и социально-экономических системах. Разработка моделей, позволяющих предсказывать время и другие характеристики периодических процессов в этих системах, является эффективным способом анализировать, например, сельскохозяйственные или производственно-экономические процессы.
Источник
Учебники
Журнал «Квант»
Общие
Математический маятник. Период колебаний математического маятника
Математическим маятником называют материальную точку, подвешенную на невесомой и нерастяжимой нити, прикрепленной к подвесу и находящейся в поле силы тяжести (или иной силы).
Исследуем колебания математического маятника в инерциальной системе отсчета, относительно которой точка его подвеса находится в покое или движется равномерно прямолинейно. Силой сопротивления воздуха будем пренебрегать (идеальный математический маятник). Первоначально маятник покоится в положении равновесия С. При этом действующие на него сила тяжести \(\vec F\) и сила упругости \(\vec F_
Выведем маятник из положения равновесия (отклонив его, например, в положение А) и отпустим без начальной скорости (рис. 13.11). В этом случае силы \(\vec F\) и \(\vec F_
a_n\), которое изменяет при этом направление вектора скорости, и маятник движется по дуге ABCD.
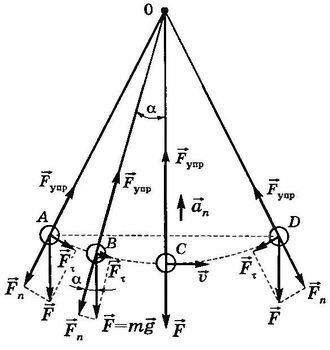
Чем ближе подходит маятник к положению равновесия С, тем меньше становится значение тангенциальной составляющей \(
F_\tau = F \sin \alpha\). В положении равновесия она равна нулю, а скорость достигает максимального значения, и маятник движется по инерции дальше, поднимаясь по дуге вверх. При этом составляющая \(\vec F_\tau\) направлена против скорости. С увеличением угла отклонения а модуль силы \(\vec F_\tau\) увеличивается, а модуль скорости уменьшается, и в точке D скорость маятника становится равной нулю. Маятник на мгновение останавливается, а затем начинает двигаться в обратном направлении к положению равновесия. Вновь пройдя его по инерции, маятник, замедляя движение, дойдет до точки А (трение отсутствует), т.е. совершит полное колебание. После этого движение маятника будет повторяться в уже описанной последовательности.
Получим уравнение, описывающее свободные колебания математического маятника.
Пусть маятник в данный момент времени находится в точке В. Его смещение S от положения равновесия в этот момент равно длине дуги СВ (т.е. S = |СВ|). Обозначим длину нити подвеса l, а массу маятника — m.
Из рисунка 13.11 видно, что \(
F_\tau = F \sin \alpha\), где \(\alpha =\frac
Знак минус в этой формуле ставят потому, что тангенциальная составляющая силы тяжести направлена к положению равновесия, а смещение отсчитывают от положения равновесия.
Согласно второму закону Ньютона \(m \vec a = m \vec g + F_
Из этих уравнений получим
\(a_\tau = -\frac
a_x + \omega^2x = 0\) (см. § 13.3), можно сделать вывод, что математический маятник совершает гармонические колебания. А так как рассмотренные колебания маятника происходили под действием только внутренних сил, то это были свободные колебания маятника. Следовательно, свободные колебания математического маятника при малых отклонениях являются гармоническими.
Обозначим \(\frac
Период колебаний маятника \(T = \frac<2 \pi><\omega>.\) Следовательно,
Это выражение называют формулой Гюйгенса. Оно определяет период свободных колебаний математического маятника. Из формулы следует, что при малых углах отклонения от положения равновесия период колебаний математического маятника: 1) не зависит от его массы и амплитуды колебаний; 2) пропорционален корню квадратному из длины маятника и обратно пропорционален корню квадратному из ускорения свободного падения. Это согласуется с экспериментальными законами малых колебаний математического маятника, которые были открыты Г. Галилеем.
Подчеркнем, что эту формулу можно использовать для расчета периода при одновременном выполнении двух условий: 1) колебания маятника должны быть малыми; 2) точка подвеса маятника должна покоиться или двигаться равномерно прямолинейно относительно инерциальной системы отсчета, в которой он находится.
Если точка подвеса математического маятника движется с ускорением \(\vec a\) то при этом изменяется сила натяжения нити, что приводит к изменению и возвращающей силы, а следовательно, частоты и периода колебаний. Как показывают расчеты, период колебаний маятника в этом случае можно рассчитать по формуле
g’\) — «эффективное» ускорение маятника в неинерциальной системе отсчета. Оно равно геометрической сумме ускорения свободного падения \(\vec g\) и вектора, противоположного вектору \(\vec a\), т.е. его можно рассчитать по формуле
\(\vec g’ = \vec g + (- \vec a).\)
Литература
Аксенович Л. А. Физика в средней школе: Теория. Задания. Тесты: Учеб. пособие для учреждений, обеспечивающих получение общ. сред, образования / Л. А. Аксенович, Н.Н.Ракина, К. С. Фарино; Под ред. К. С. Фарино. — Мн.: Адукацыя i выхаванне, 2004. — С. 374-376.
Источник







